首页 / 触觉传感器
首页 / 触觉传感器
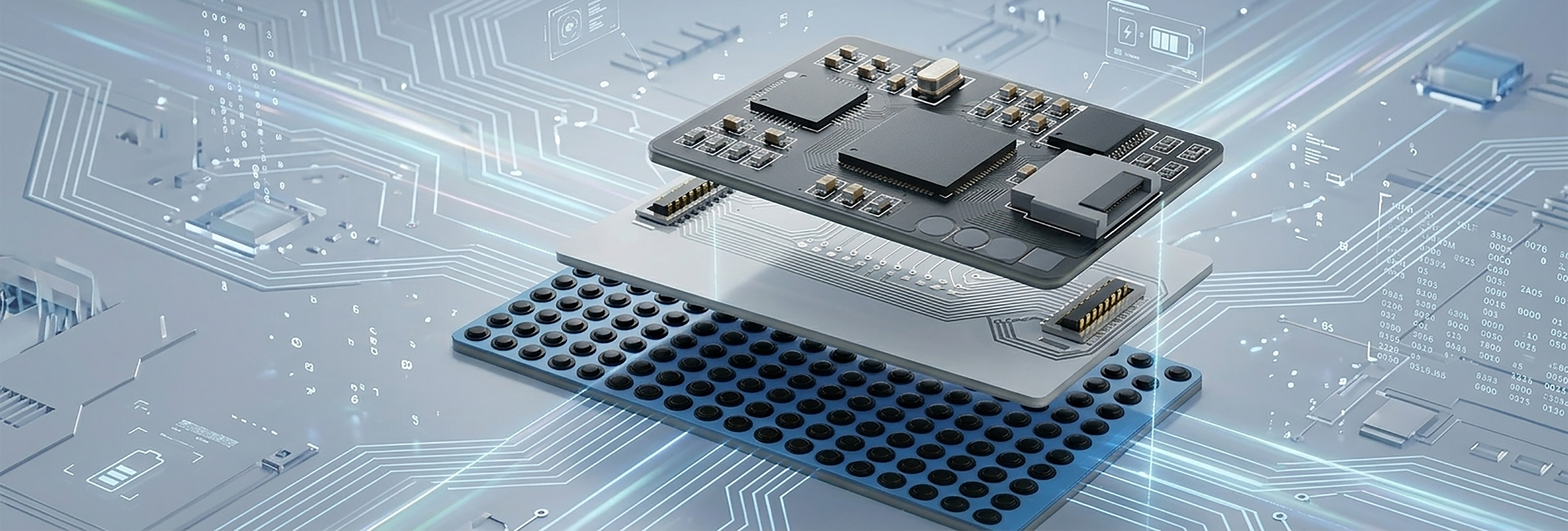
垂直结构(正面)
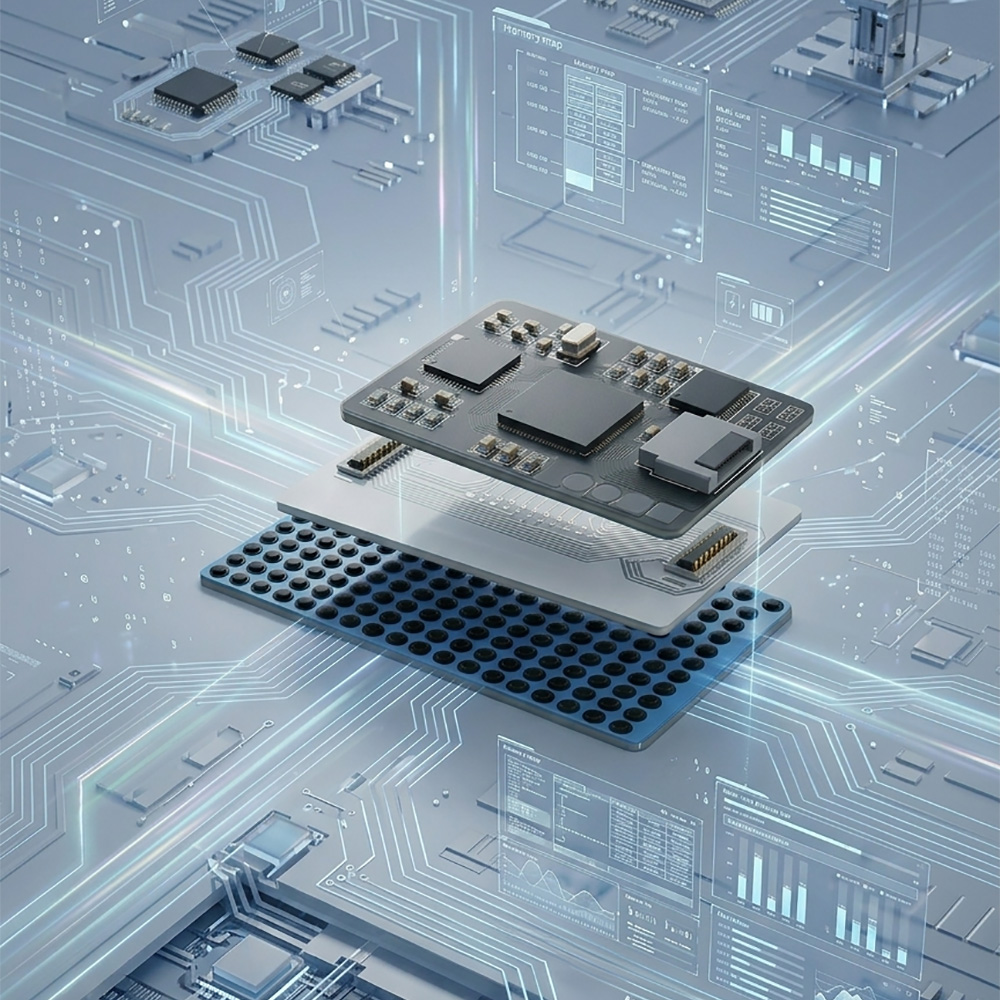
垂直结构(反面)
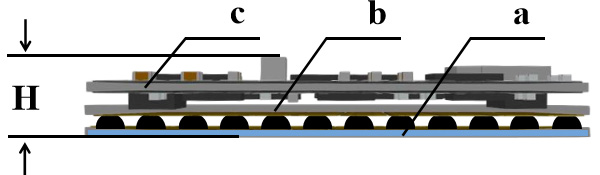
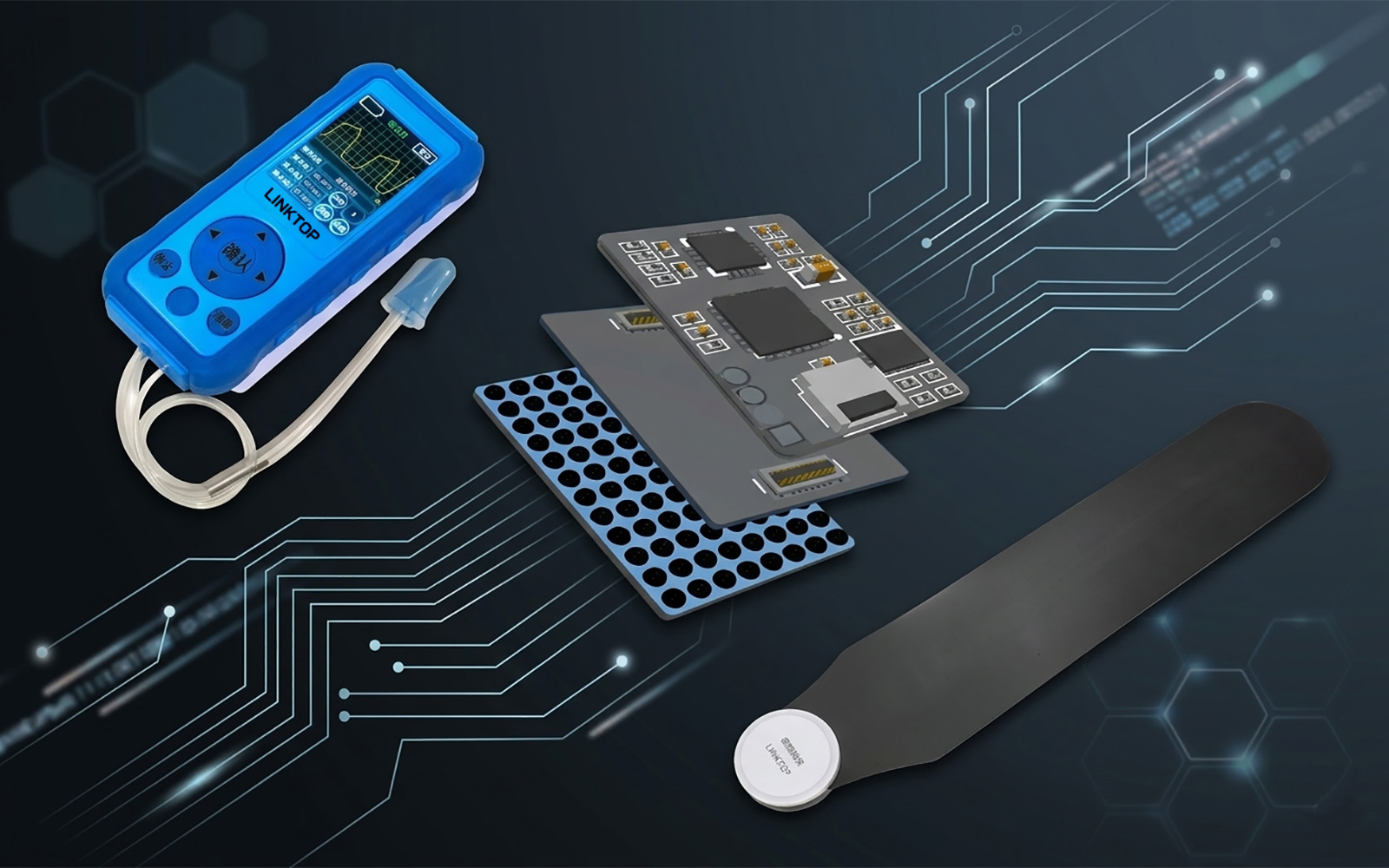
垂直结构(侧面)
触觉传感器
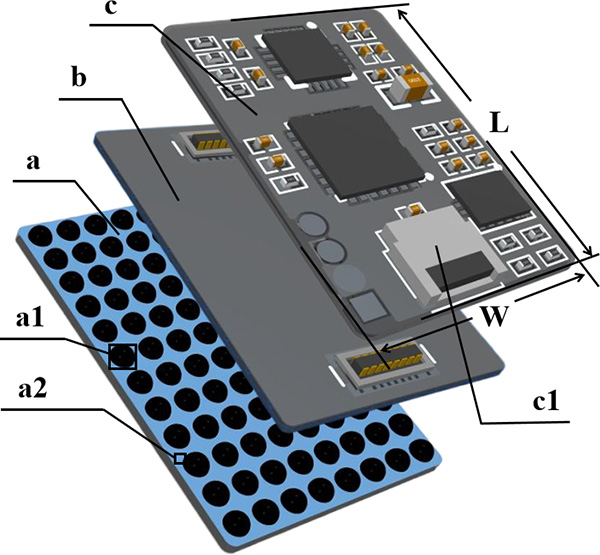
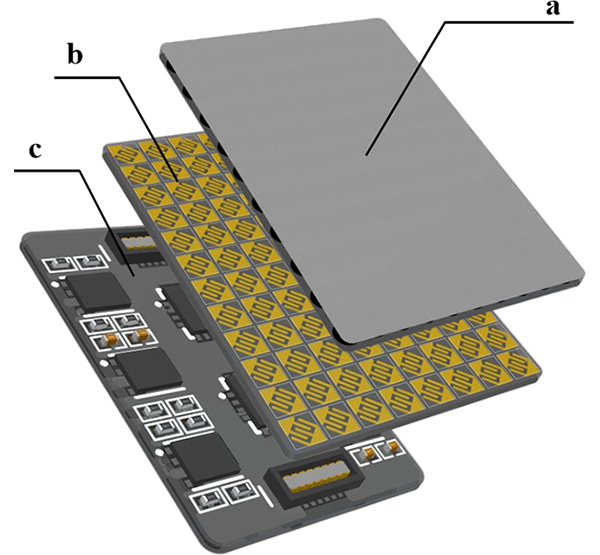
◉a:导电聚合物薄膜
◉a1:导电颗粒
◉a2:柔性绝缘衬底
◉b:电极阵列
◉c:信号处理电路
◉c1:通信接口
◉导电聚合物薄膜:自研的导电聚合物材料可将机械刺激转换为可测量的电信号;
◉电极阵列:负责采集导电聚合物薄膜上不同位置的电信号,实现对压力值和压力分布的高分辨率检测;
◉信号处理电路:对电极阵列输出的原始电信号进行放大、滤波、模数转换等处理,最终输出可供微处理器或控制系统识别的触觉信息。
构建机器人手指触觉的核心器件之一
触觉传感器是机器感知外界的核心器件,更是机器人产业的关键核心技术。我司全新推出采用导电聚合物材料的高分辨率触觉传感器,该材料兼具优异柔韧性与压阻特性,适配机器人触觉手指阵列搭建。产品搭载高密度电极阵列与高精度采集电路,可精准解析压力传感信号。产品应用场景广阔,可广泛适配智能机器人、智能穿戴、医疗康复、汽车电子、智能家居等众多领域。参数规格
| 项目 | 参数说明 | 备注 |
|---|---|---|
| 传感原理 | 压阻式 | |
| 外观尺寸 | 传感器尺寸:L × W × H = 16 × 11 × 4 mm | |
| 通信方式 | 串口通信,波特率921600 | 1.27mm*4pin FPC接口 |
| 采样频率 | 15 Hz | |
| 电极形式 | 插指电极 | |
| 最小触发力 | 0.1 N | |
| 量程范围 | ≤40 N | 量程范围可调 |
| 重复精度 | <10%,10N负载 | |
| 产品一致性 | <15%,10N负载 | |
| 工作电压 | 3.3V | |
| 工作湿度 | 5% ~ 95% RH | 无冷凝 |
| 工作温度 | -20℃ ~ +85℃ | |
| 工作电流 | ≤30 mA | |
| 安全过载 | 200% | |
| 冲击过载 | 300% | |
| 点阵密度 | >54/cm² | 每单位面积的感应单元数量 |
ICP备案号:粤ICP备2026062247号-1
Copyright © 2025-2026 江门市领拓科技有限公司